Yaskawa Develops an Ankle-Assist Walking Device for Those with Walking Impediments Caused by Stroke and Other Factors

Yaskawa Develops an Ankle-Assist Walking Device for Those with Walking Impediments Caused by Stroke and Other Factors
Date: September 9, 2013
Source: YASKAWA Electric Corporation
In a collaborative research effort with Shibaura Institute of Technology, Hiroshima University and Space Bio-Laboratories, Yaskawa Electric Corporation (Junji Tsuda, Representative Director, Chairman and President) has recently developed an ankle-assist walking device. Use of this device is expected to improve gait and restore the walking abilities of those with walking impediments caused by stroke and other factors. With the aim of making this device more useful and promoting its spread, Yaskawa will continue its clinical research efforts, collecting evidence (clinical results) showing its therapeutic value and continuing in its efforts to improve the device. Plans are to release the device to market in 2015.
- Circumstances Surrounding Development
Each year approximately 300,000 people suffer stroke in Japan; the total number of stroke victims in the country is estimated to be upwards of 3 million individuals. Many stroke victims are left with paralysis on one side of their bodies and other disabilities that prevent them from walking normally (gait), leading to reduced ADL (activities of daily living). When plantarflexion and dorsiflexion of the ankle are insufficient while walking, there is an especially high risk of falls. Thus, with traditional rehabilitation, where safety is paramount, it was common to install equipment that stabilized the ankle at an angle so that the patient’s toes would not drag or get caught on anything. With only verbal instructions given by the therapist, it was difficult for patients themselves to understand and learn how to move their ankle – as well as the timing involved with such movement – when walking, meaning patients found it difficult to walk properly.
- Goals of Development
Given the challenges outlined above, Yaskawa set to work on collaborative research efforts with research groups from the Shibaura Institute of Technology and Hiroshima University. Aimed at practical application and based on these groups’ unparalleled track record in research as well as Yaskawa’s technology, this cooperative research led to the development of an ankle-assist walking device that utilizes Yaskawa’s motion control and robot technology. Utilizing information received from sensors on the soles of the patient’s feet, this device assists the plantarflexion and dorsiflexion ankle movements needed to walk, making it possible for recurrent walking rehabilitation to be carried out safely and over a sustained period of time. The device may also help to alleviate the burdens experienced by physical therapists when working with patients on rehabilitation of walking functions. - Features of the Ankle-Assist Walking Device
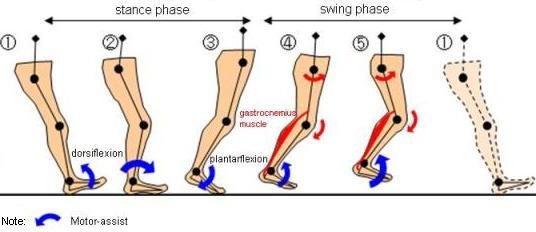
- Utilizing information received from sensors on the soles of the patient’s feet, the motor of this device assists the dorsiflexion movements of the ankle so that when the patient’s heel comes in contact with the ground, during the time of contact there is a forward transfer of the center of gravity, giving him or her the power necessary to stride forward.
- When starting to walk, dorsiflexion assistance acts to expand the gastrocnemius muscle (a single biarticular muscle that saddles two joints), thus causing reflexive muscle contraction. This reflexive muscle contraction links the movements of the patient’s knees and hips, allowing for a smooth start.
- Device configuration is straightforward, meaning that putting the device on, setting it up and making adjustments can be done quickly and easily. What’s more, because the device is small and can be carried directly on the body, it can be worn in or under the patient’s clothing, thus eliminating restrictions to movement and greatly aiding in walking rehabilitation activities.
- So that the part of the device placed on the ankle could be lightweight, thus lessening the burden placed on the patient, the ankle drive and controller are separate, with power transferred directly to the ankle via the device’s small, flat motor.




